Hi, I'm Deepikaa Anjan Kumar.
A
A Robotics and Automation systems enthusiast with a background in artificial intelligence and machine learning.
About
I am a Master’s student in Robotics and Autonomous Systems (Artificial Intelligence) at Arizona State University, with a strong academic foundation in Artificial Intelligence and Machine Learning. My interests lie at the intersection of robotics, intelligent systems, and applied machine learning. I bring hands-on experience in ROS / ROS 2, PDDL-based planning, machine learning, and data-driven system development, supported by strong programming skills in Python, C++, and Java. My work spans robotic perception and control, simulation-based experimentation, and analytical modeling for real-world problem solving. Through my professional and internship experiences, I have developed expertise in Python-based development, backend frameworks, and analytical workflows, while collaborating across multidisciplinary teams to deliver reliable, well-tested solutions. I approach problems with a structured, systems-oriented mindset and a strong emphasis on clarity, reproducibility, and performance. I am motivated by opportunities that involve designing and deploying intelligent robotic systems, translating research concepts into practical implementations, and building robust software solutions that address complex, real-world challenges.
- Programming Languages: Python, C++, Java, JavaScript, R, MATLAB
- Web & Backend: HTML, CSS, PHP, Django, Flask, Node.js
- Machine Learning & Data: NumPy, Pandas, Matplotlib, TensorFlow
- Robotics & Simulation: ROS / ROS 2, Gazebo, OpenCV, PDDL
- Databases: MySQL
- Tools & Platforms: Git, VS Code, GCP, Tableau, Power BI
Experience
EDPLUS
- Executed functional, regression, and accessibility testing across 80+ Canvas-based LMS courses, ensuring compliance with WCAG 2.1 AA and reducing post-launch defects by 35%.
- Conducted system-level QA for SCORM packages, LTI integrations, and third-party tools; resolved cross-browser and cross-device issues to achieve a 98% pass rate.
- Authored reusable QA checklists and test cases, cutting manual review time by 30% and improving issue turnaround by 25% through structured defect triage.
- Tools: Canvas LMS, SCORM tools, BrowserStack (cross-browser testing), Axe / WCAG testing tools, Power BI
MITHYA
- Developed and validated supervised ML models using Python (Pandas, scikit-learn) and R on real-world datasets, improving prediction accuracy by 20%.
- Implemented end-to-end data pipelines for preprocessing, feature engineering, and validation, reducing manual data handling effort by 30%.
- Interpreted model results using statistical analysis and performance metrics (precision, recall, RMSE) and surfaced insights via Power BI and Tableau.
- Tools: Python, Pandas, scikit-learn, R, Power BI, Tableau, Jupyter
PANDETEENS
- Built AI-driven data visualization systems using Python and TensorFlow, increasing user engagement by 30%.
- Implemented ML-based recommendation and natural-language data exploration tools, reducing reporting time by 40% and improving content reach by 25%.
- Streamlined data processing workflows for high-volume inputs and productionized ML-powered features for content teams.
- Tools: Python, TensorFlow, Pandas, Flask, Power BI, Tableau
Projects
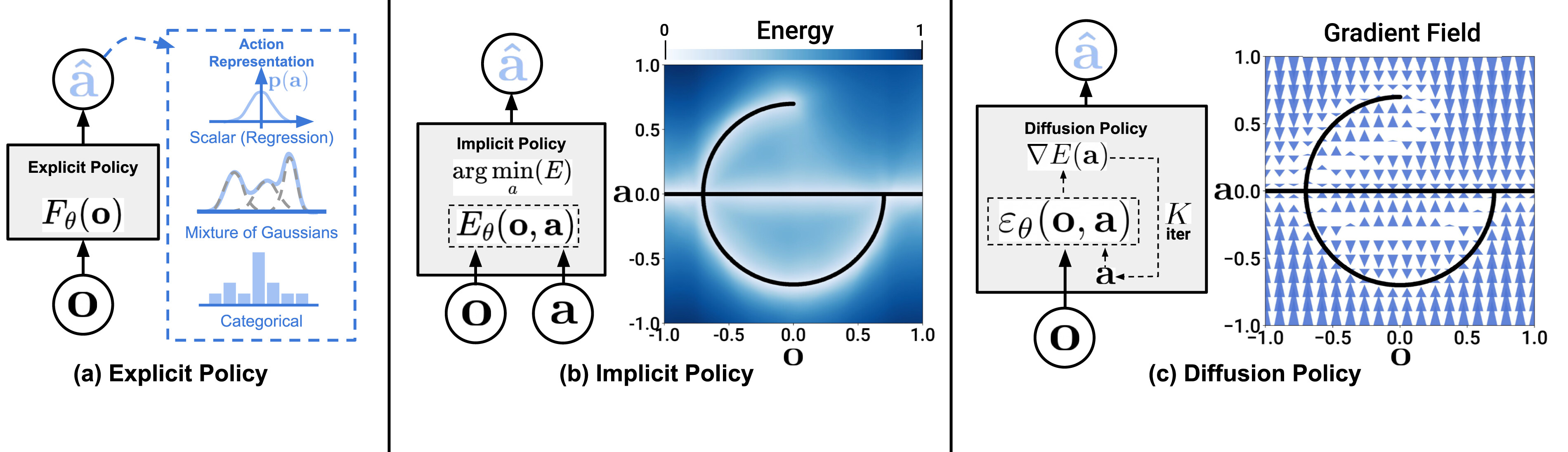
Diffusion-policy reinforcement learning for robotic manipulation: trained on Push-T expert demonstrations and deployed in 2D/3D simulators with ROS 2 / MoveIt 2 integration.
- Key result: Trained on 206 expert demos, reduced MSE ≈ 1.19 → 0.10 across 5,000 steps.
- Validated in Gym-PushT (2D) and NVIDIA Isaac Sim (3D) for consistent task success and smooth trajectories.
- Integrated policy outputs with ROS 2 and MoveIt 2 to convert Cartesian trajectories into collision-aware UR5 joint commands.
- Evaluation: IoU-based success metrics, latency profiling, and sim-to-real robustness analysis.
- Tools: PyTorch, NumPy, ROS 2, MoveIt 2, Isaac Sim, Gym, Open3D
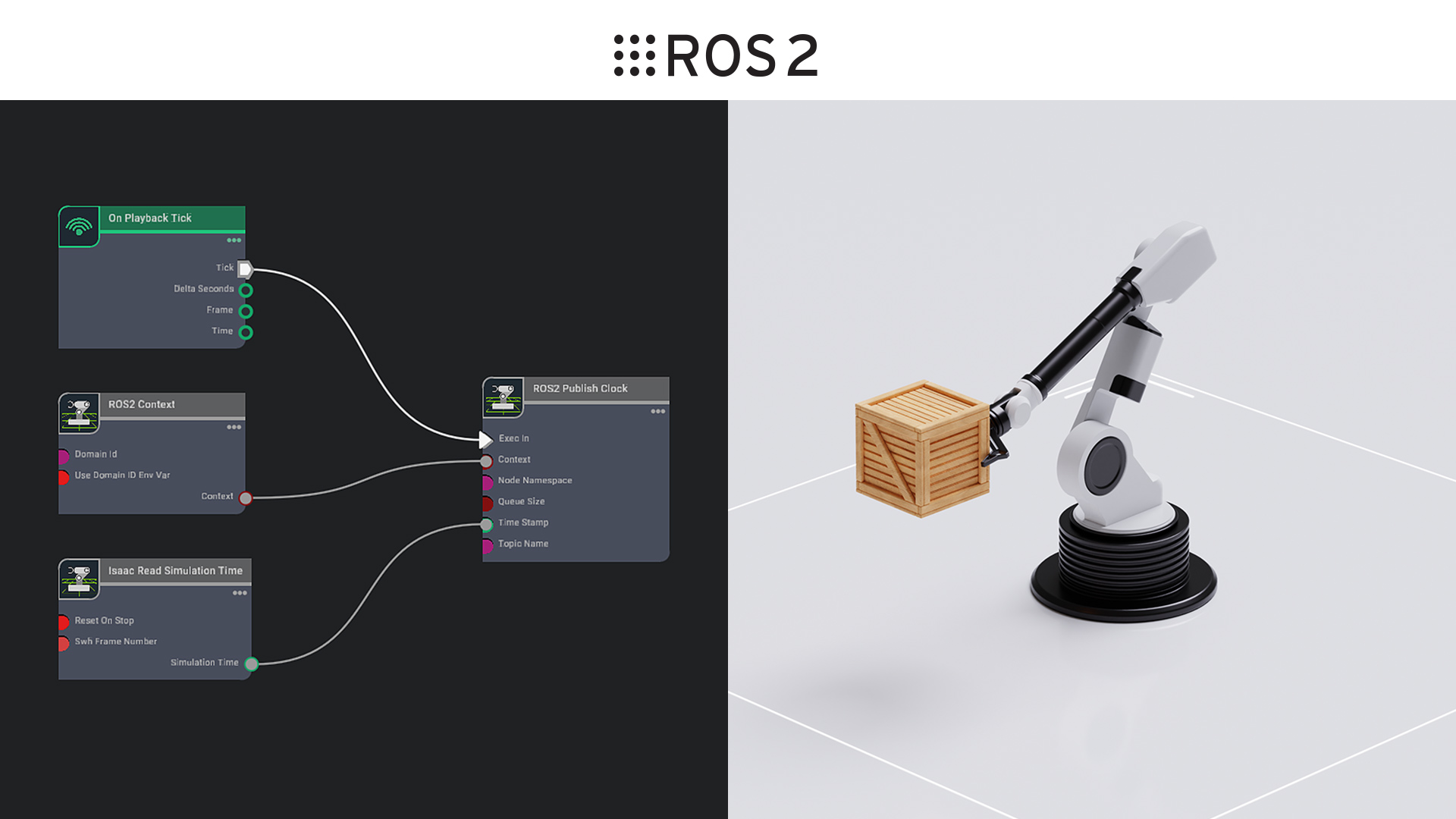
Full-stack simulation pipeline enabling SLAM, localization, and autonomous navigation for LiDAR-equipped robots — containerized for reproducible experiments.
- Integrated perception, mapping (LiDAR-based SLAM), and motion planning modules for closed-loop autonomy in complex environments.
- Evaluated localization accuracy and navigation stability under sensor noise and moving obstacles; reported drift and failure modes.
- Containerized experiments with Podman to ensure reproducibility and scalable deployment across machines.
- Tools: ROS 2, Isaac Sim, Cartographer / RTAB-Map, PCL, Docker/Podman, Python, C++
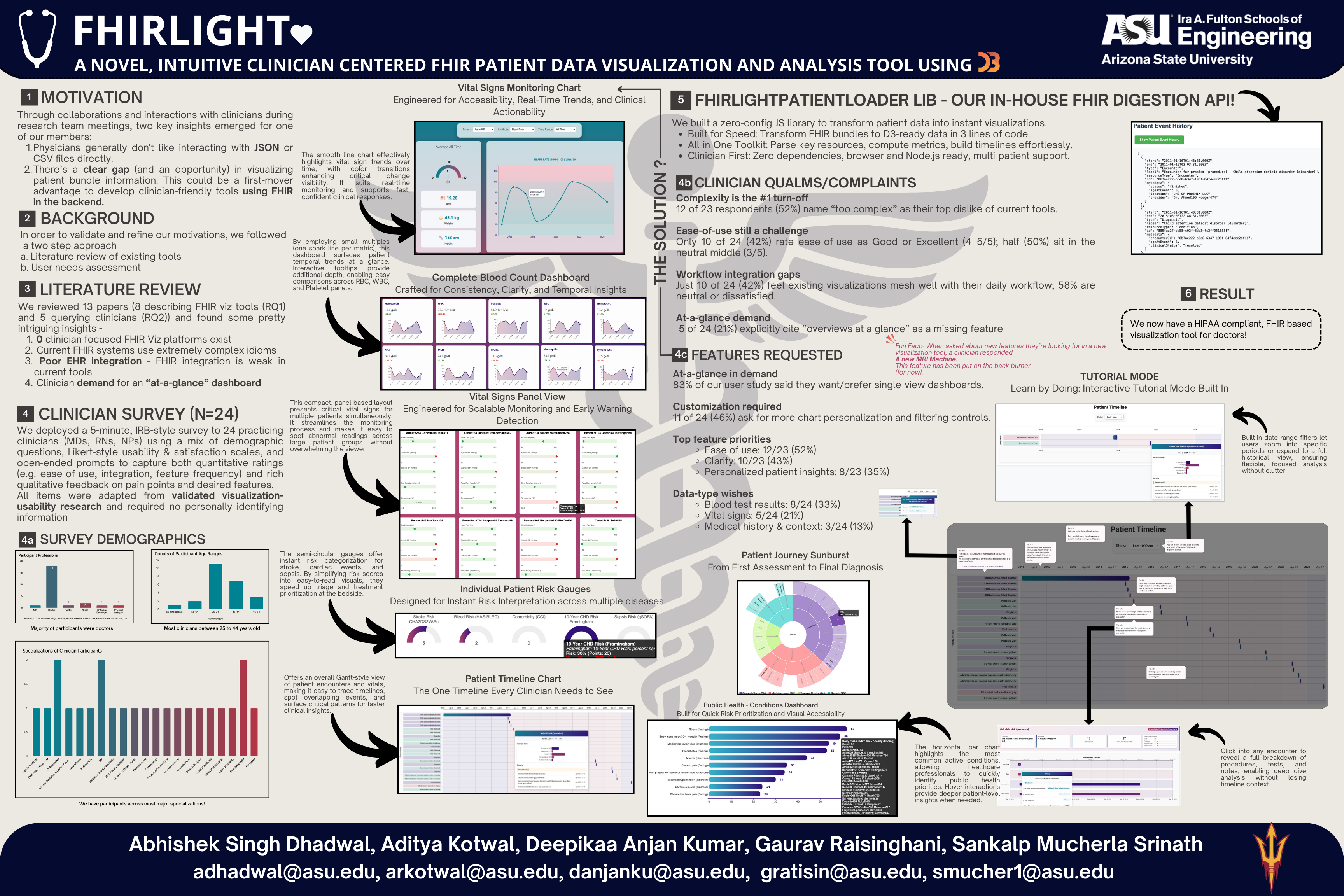
Transforming raw FHIR records into interactive patient timelines with embedded clinical risk models and clinician-facing visual analytics.
- Designed parsing & normalization pipelines to handle heterogeneous EHR formats and reduced manual preprocessing effort.
- Integrated clinical risk predictors (qSOFA, Charlson) and visualized risk trends in real time; usability tested with 24+ clinicians.
- Emphasized interpretability with feature-level explanations and temporal trend dashboards.
- Tools: Python, Flask, React (timeline visualizations), FHIR API, Pandas, Scikit-learn
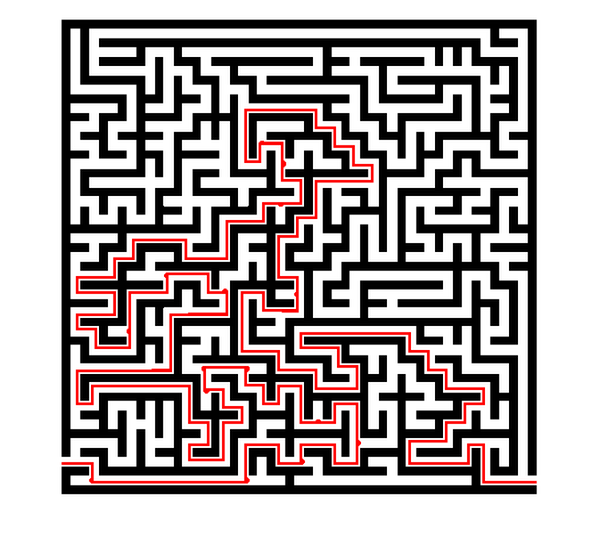
Real-time maze perception via AR cameras and OpenCV with A* pathfinding; commanded 6-axis arms for precision maze traversal.
- AR camera + OpenCV wall detection pipeline feeding A* path-planning; achieved ≈ 90% navigation accuracy.
- Programmed 6-axis robot joint trajectories for coordinate-based execution; improved motion accuracy by 15% vs baseline.
- System reduced navigation errors by ~25% through sensor fusion and closed-loop correction.
- Tools: OpenCV, A* algorithm, ROS, URScript / robot SDK, Python
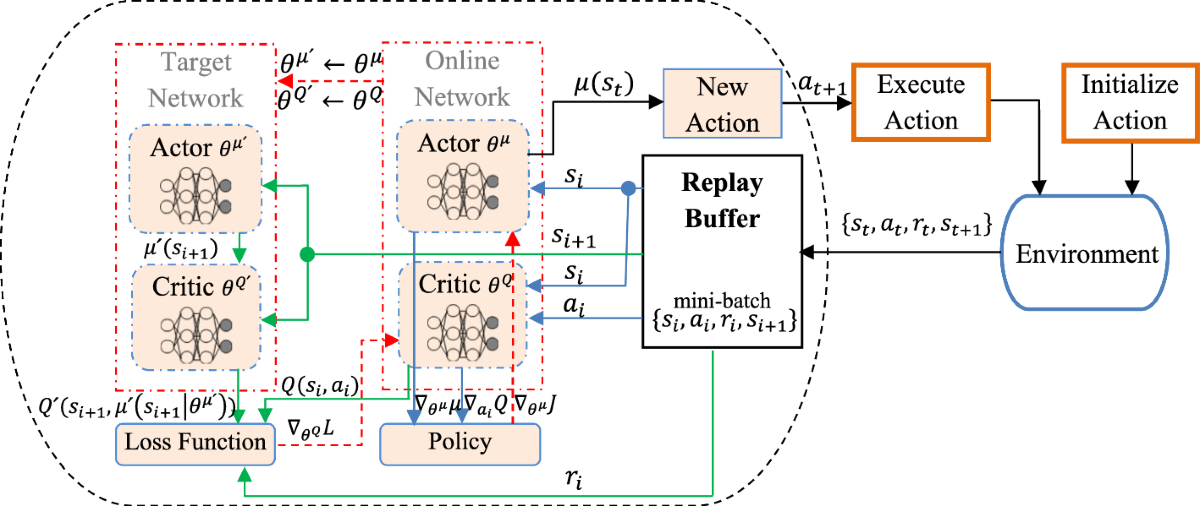
Reinforcement-learning based training (DDPG and variants) for simulated robot tasks in Gazebo with ROS integration and performance tuning.
- Trained RL agents using DDPG; achieved ~95% simulated task success after hyperparameter tuning and curriculum learning.
- Integrated policy rollouts with ROS for real-time decision loops and closed-loop control.
- Performed bottleneck analysis to improve throughput and reduced experiment runtime by 20%.
- Tools: Gazebo, ROS, OpenAI Gym wrappers, Stable Baselines / custom RL, PyTorch
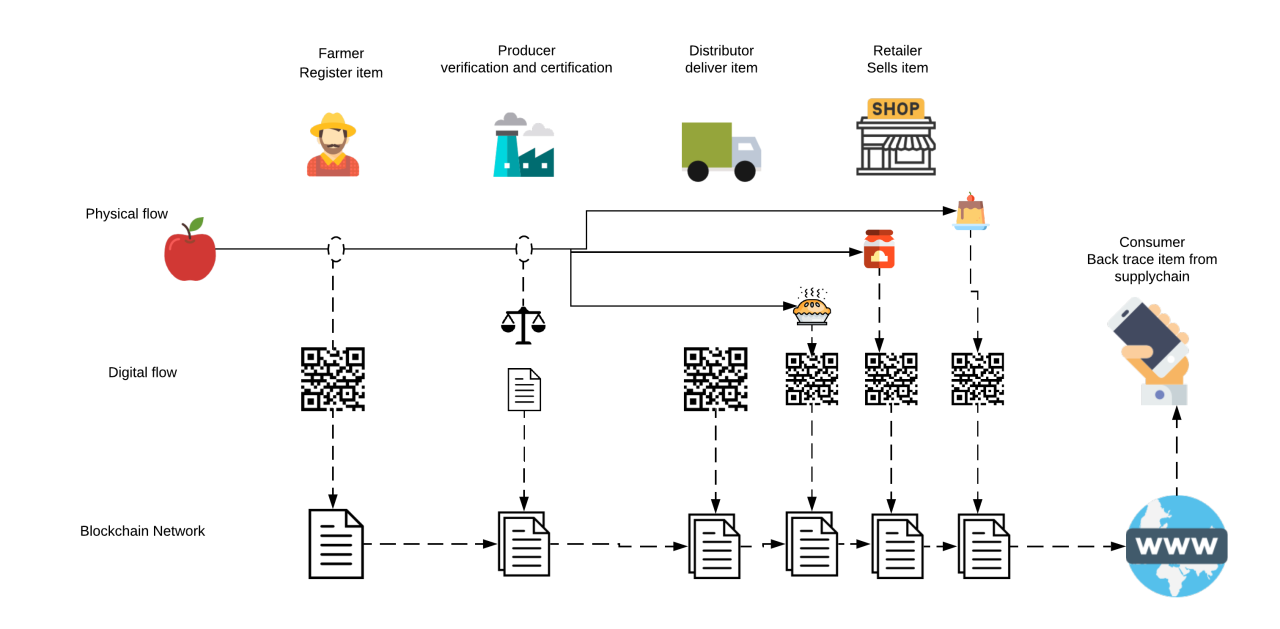
Smart-contract-backed provenance system for organic produce that ensures immutable records and improves transparency across stakeholders.
- Implemented smart contracts (Solidity) and local chain workflows (Ganache + MetaMask) to automate provenance recording.
- Demonstrated a 100% increase in traceability visibility and a 30% reduction in data discrepancies vs legacy workflows.
- Ran stakeholder workshops and iterated on UX / data schemas for production readiness.
- Tools: Solidity, Ganache, Truffle/Hardhat, Node.js, Flask, PostgreSQL
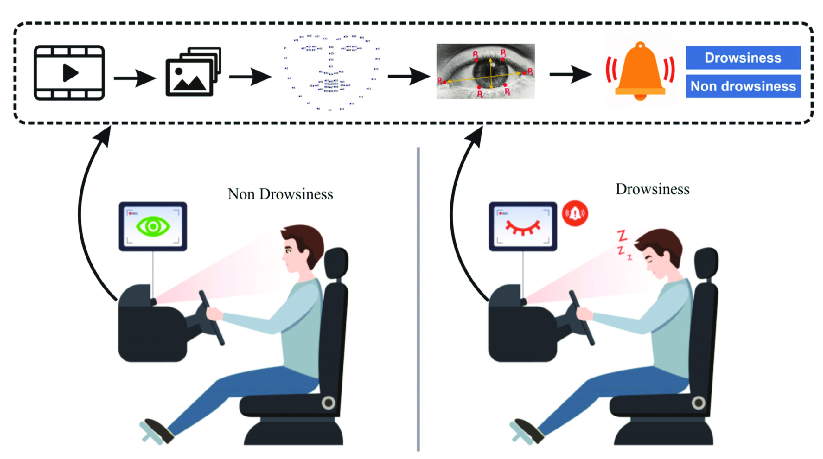
Real-time computer vision system for detecting driver fatigue using facial landmarks and temporal behavior analysis.
- Built a real-time fatigue detection pipeline using eye-blink rate and facial landmark analysis, achieving ~85% accuracy.
- Optimized inference for low-latency alerts, reducing simulated accident scenarios by ~40%.
- Improved robustness across lighting and motion conditions using temporal smoothing and data augmentation.
- Tools: OpenCV, Dlib, Imutils, SciPy, Python
Full-stack web application for managing patient records, appointments, and billing with a focus on usability and data integrity.
- Developed a role-based hospital management system to handle patients, scheduling, and billing workflows.
- Designed a normalized MySQL database and backend logic, improving operational efficiency by ~25%.
- Enhanced UX with a responsive interface, reducing staff onboarding and training time by ~30%.
- Tools: HTML, CSS, JavaScript, PHP, MySQL
Classic arcade-style Snake game demonstrating event-driven programming and real-time game logic in Java.
- Implemented a Snake game using Java Swing with event-driven input handling and real-time rendering.
- Developed collision detection, scoring logic, and adaptive speed control for smooth gameplay.
- Structured code using MVC-style separation for maintainability and extensibility.
- Tools: Java, Swing, Git
Skills
LANGUAGES AND DATABASES
 C / C++
C / C++
 Java
Java
 JavaScript
JavaScript
 MATLAB
MATLAB
 R
R
LIBRARIES, TOOLS AND OS
 Git / GitHub
Git / GitHub
 Linux
Linux
 Windows
Windows
 Docker / Podman
Docker / Podman
FRAMEWORKS & PLATFORMS
 PyTorch
PyTorch
 MoveIt 2
MoveIt 2
 Isaac Sim
Isaac Sim
ROBOTICS TOOLS
 ROS
ROS
 Gazebo
Gazebo
 PDDL
PDDL
Education
Tempe, AZ, USA
Degree: Master of Science in Robotics and Autonomous Systems (Artificial Intelligence)
Status: Currently Enrolled
- Robotics Systems
- Artificial Intelligence
- Robot Learning and Decision Making
- Reinforcement Learning
- Computer Vision for Robotics
- Autonomous Navigation and SLAM
- Perception and Sensor Fusion
- Planning and Motion Control
Relevant Coursework:
Bangalore, India
Degree: Bachelor of Engineering in Artificial Intelligence and Machine Learning
CGPA: 8.55 / 10
- Data Structures and Algorithms
- Database Management Systems
- Operating Systems
- Internet of Things (IoT)
- Cloud Computing
- Machine Learning
- Deep Learning Techniques
- Natural Language Processing
- Artificial Intelligence for Robotics
Relevant Coursework: